Ocean processes are dynamic and complex events that occur on multiple different spatial and temporal scales. To obtain a synoptic view of such events, ocean scientists focus on the collection of long-term time series data sets. Measurements are continually provided by fixed sensors, e.g., moorings, or gathered from ships. Recently, an increase in the utilization of Autonomous Underwater Vehicles has enabled dynamic data acquisition (source).
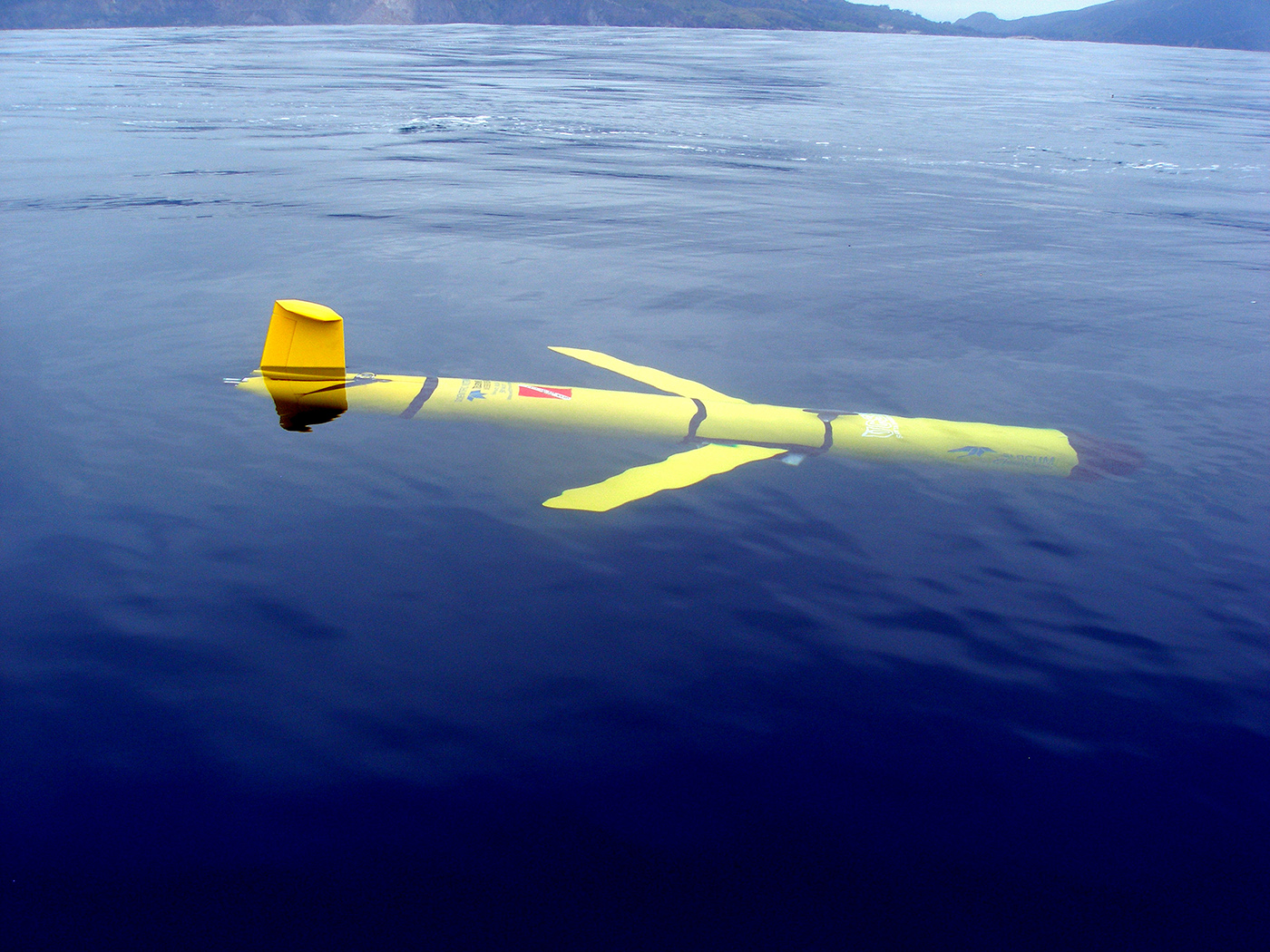
An underwater glider is a type of AUV that uses small changes in its buoyancy in conjunction with wings to convert vertical motion to horizontal, and thereby propel itself forward with very low power consumption…gliders using buoyancy-based propulsion represent a significant increase in range and duration compared to vehicles propelled by electric motor-driven propellers, extending ocean sampling missions from hours to weeks or months, and to thousands of kilometers of range…A wide variety of glider designs are in use by Navy and ocean research organizations and typically cost $100,000 (source).
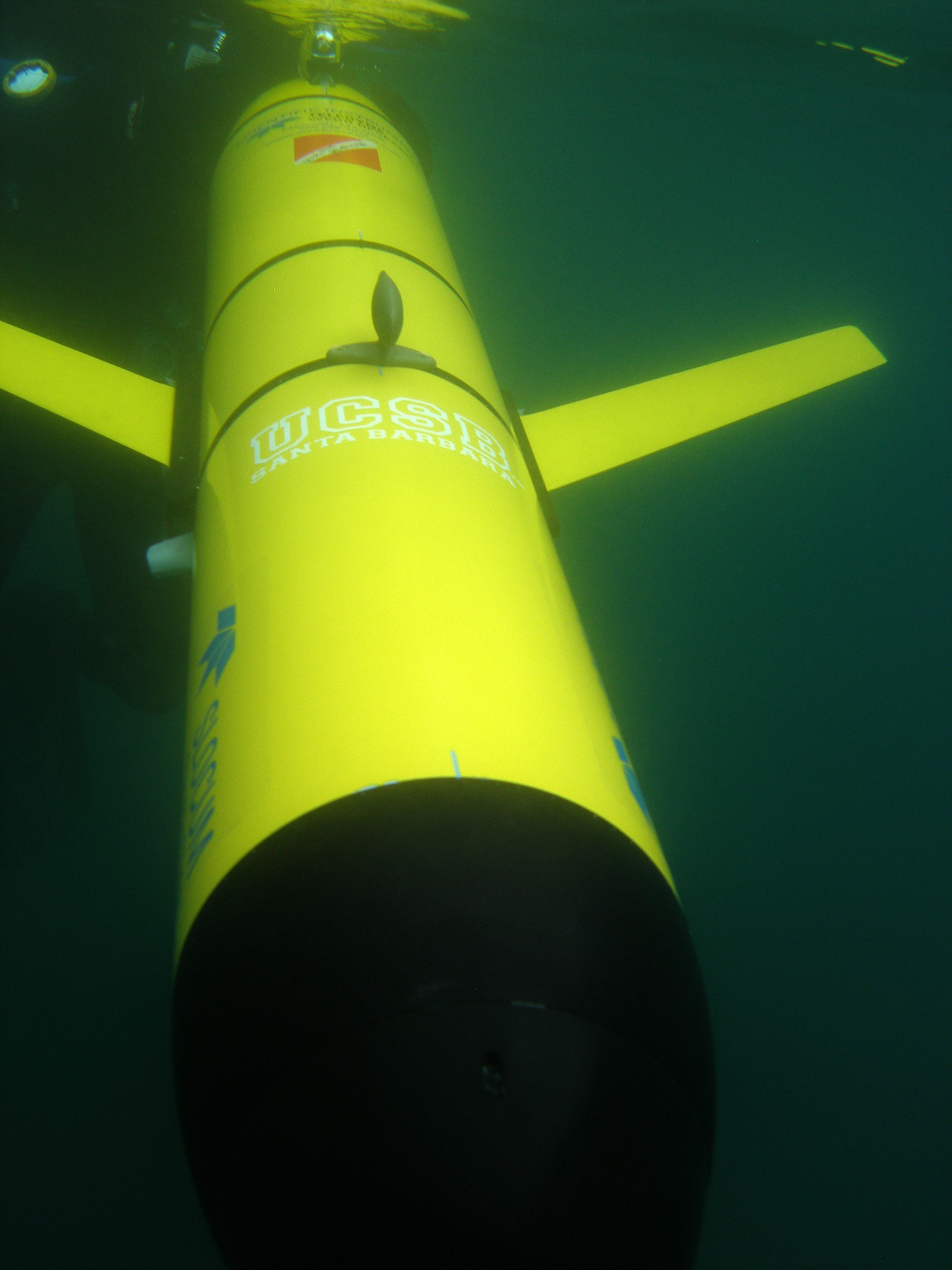
The glider used by the UCSB Earth Research Institute (ERI) is actually owned by The Santa Barbara Coastal Long-Term Ecological Research Project (SBC-LTER) which is housed at the Marine Science Institute at UCSB and is part of the National Science Foundation’s Long-Term Ecological Research (LTER) Network. The LTER Program was established by the NSF in 1980 to support research on long-term ecological phenomena, such as the giant kelp forest ecosystems in southern California. As a related project, “Plumes & Blooms” in the Santa Barbara Channel (see http://www.icess.ucsb.edu/PnB/PnB.html for more on the latter) benefits from collaboration with the SBC-LTER. ERI provides the majority of the manpower for programming, deploying, and recovery of the glider which is affectionately referred to as “Olly,” short for the Barbareño Chumash word for sea otter (olqhósh).
According to Stuart Halewood, the Associate Development Engineer for ERI who is in charge of mission planning/monitoring, deployment, recovery, and maintenance of Olly, the glider “is a buoyancy-driven vehicle, which means it sucks in seawater into the nose section which causes it to loose buoyancy at a prescribed rate. At a preplanned maximum dive depth, this water is expelled and Olly climbs. The short carbon fiber wings and the movable battery pack within Olly allow us to set the dive and climb angle and therefore Olly’s horizontal speed as it collects data over a sawtooth pattern of dives. Using a set of programmed mission behaviors, we can set Olly to surface at prescribed times and relay data back to us via Iridium satellite transmission or FreeWave radio communications; head to different waypoints, depending on changing conditions; and change which sensors sample and how often, as well as surfacing for recovery at a prescribed safe location.”
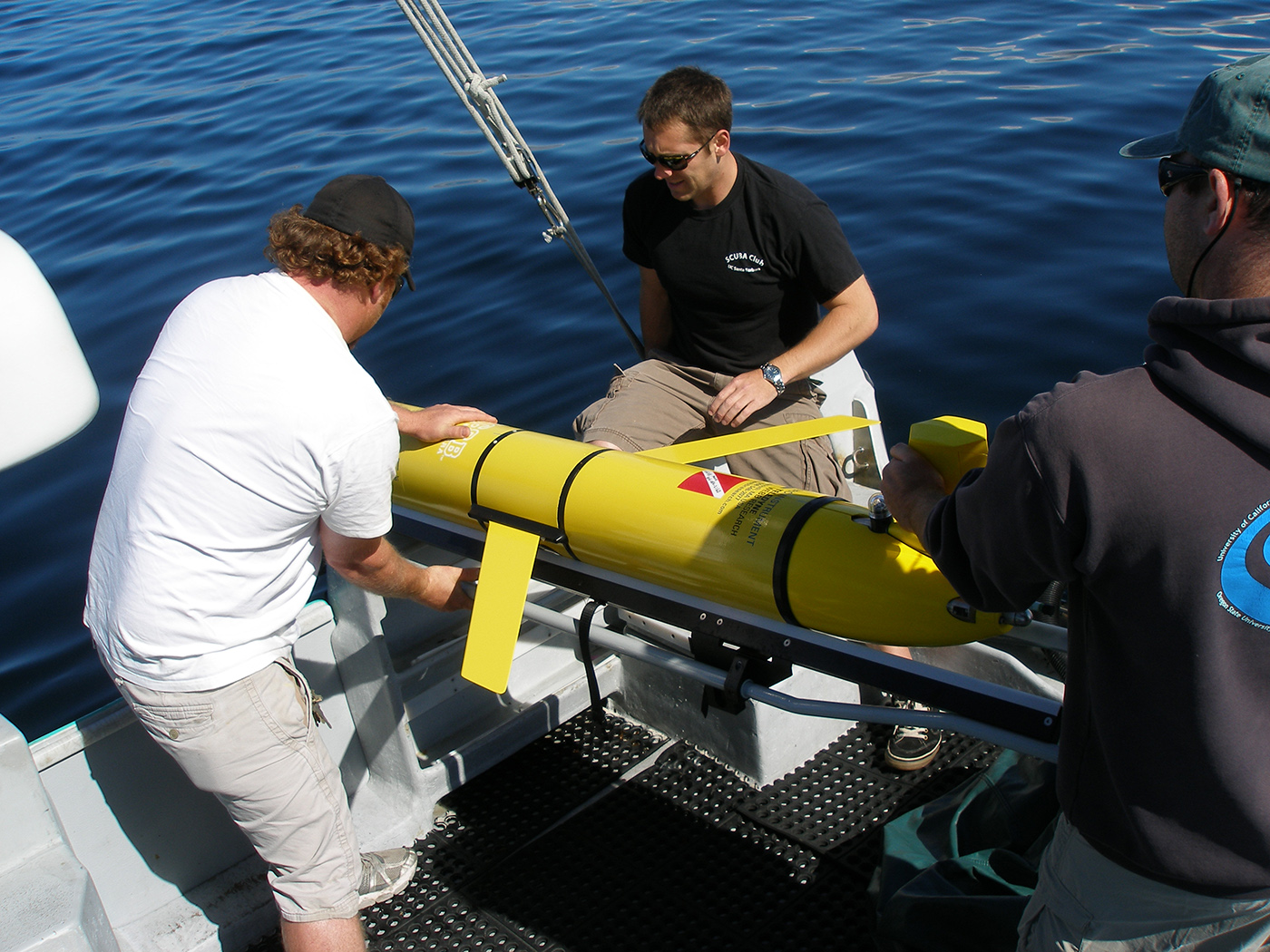
“Olly is predominately deployed from the SBC-LTER small boat R/V Kelpfish. Currently, we are doing regular Cross-shelf missions on a 4km transect offshore of Mohawk reef that allow us to repeat the data coverage many times over the approximately 21 day missions. We are also running ‘virtual mooring’ missions where Olly dives between two points repeatedly and maintains its position, effectively simulating a moored instrument. So far, we have deployed Olly on 15 Missions, 9 of which were Mohawk Cross-shelf missions that equate to more than 300 Cross-shelf Transects.”
“The Teledyne Webb Research (TWR) Glider Deployment Plan for ERI and SBC-LTER involves obtaining seasonally resolved cross-channel and alongshore glider sections in support of the ongoing ERI Plumes and Blooms project. The TWR electric glider is designed to operate from 4 to 200 meters, and it measures conductivity, temperature, and pressure; dissolved oxygen; chlorophyll-fluorescence (Chl-fl); colored dissolved organic matter fluorescence (CDOM-fl), and three channels of spectral backscatter. These data can be used to derive many physical and biogeochemical parameters, such as density, salinity, phytoplankton biomass, production rates, particle size and composition, which will be used for assessing time/space variations of plumes, bloom, and physical links between the deeper ocean and the innershelf. Science goals are to assess the role of synoptic scale (days to weeks) oceanographic and land-ocean interaction processes on environmental conditions in the Santa Barbara Channel.”
Other members of the ERI team who work with Olly are Erik Stassinos, an Assistant Development Engineer with ERI who is involved with mission planning/monitoring, deployment, recovery, and maintenance of Olly; and Fernanda Henderikx Freitas, a Graduate Student Researcher with ERI who is involved with mission planning/monitoring and data analysis of Olly. The SBC-LTER staff involved include many of their boat captains and divers who help with deployments and recovery. Research Biologist Daniel Reed is the primary investigator for SBC-LTER.
Editor’s note: Many thanks to Stuart Halewood for providing the material for this article, and to Derek Manov, Principal Development Engineer, for suggesting the subject matter in the first place.